Node.js 后端开发指南:搭建、优化与部署
探索PID控制器的世界,了解其在现代工业自动化中的核心作用。
PID代表比例(Proportional)、积分(Integral)、微分(Derivative),是工业自动化领域中最常用的控制方式之一。PID控制器通过比例、积分、微分三种控制方式的组合,对系统进行精确控制,以达到预定的生产或操作标准。
PID控制器是一种反馈控制器,它根据系统的偏差(即设定值与实际值之间的差异)来计算控制命令,以调整系统的运行,使其达到预定目标。PID控制器以其出色的控制效果和稳定性,在工业控制中占据着不可替代的地位。
PID控制器的历史可以追溯到1911年,由Elmer Sperry开发出第一个PID控制器。随后,Taylor Instrumental Company在1933年推出了具有完全可调功能的气动控制器。随着时间的发展,PID控制器逐渐成为工业控制的主流选择。
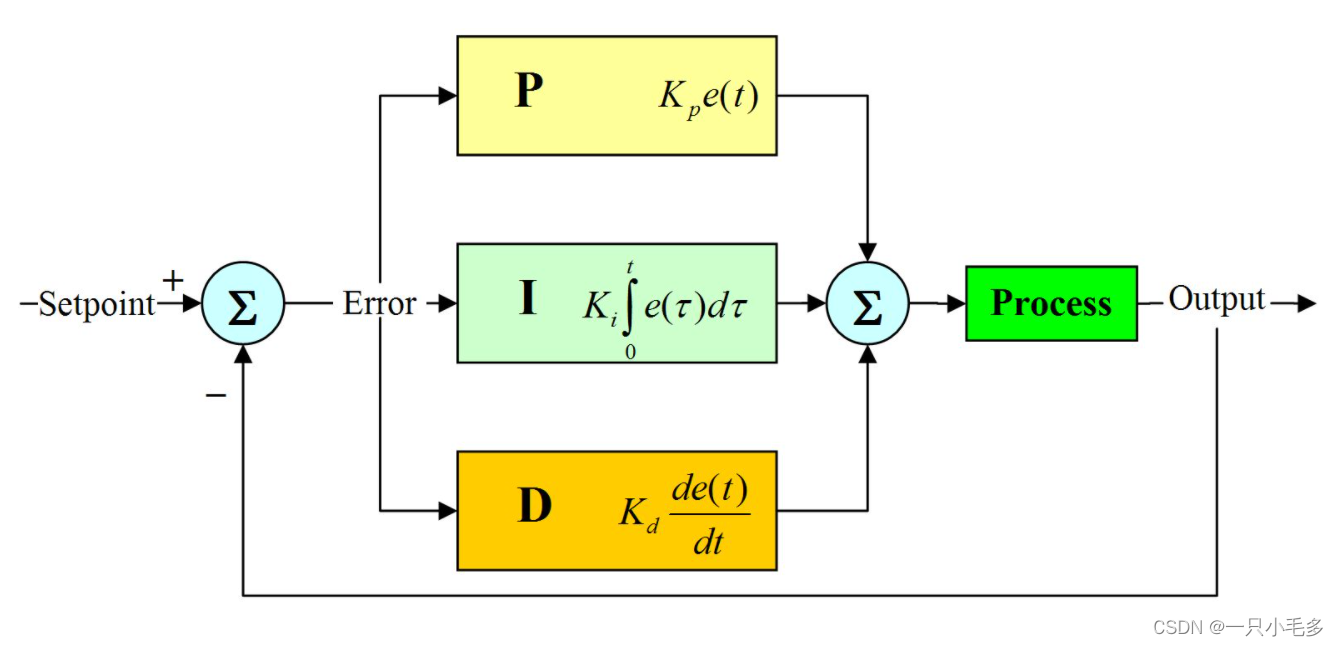
PID控制器的工作依赖于三个基本控制行为:比例(P)、积分(I)和微分(D)。
比例控制是PID控制器中最基本的形式,其输出与输入误差成比例。比例控制能够快速响应系统偏差,但单独使用时往往无法消除稳态误差。
积分控制的作用是消除稳态误差。通过累积过去的偏差,积分控制能够确保系统的输出最终能够达到设定值。
微分控制基于偏差的变化率,预测系统的未来行为,从而减少系统的超调和振荡,提高系统的稳定性和响应速度。
PID控制器根据不同的应用场景,可以分为以下几种类型。
开/关控制是一种最基本的控制方式,适用于只需要两种状态(开或关)的简单控制场合。
比例控制通过调整输出与偏差的比例关系,来减少系统的偏差,适用于对响应速度要求不高的场合。
标准型PID控制器结合了比例、积分和微分三种控制方式,适用于需要精确控制的复杂系统。
实时PID控制器能够快速响应系统的动态变化,适用于对控制速度有严格要求的场合。
PID控制器的调优是确保其正常工作的关键步骤。
试错法是一种传统的PID调优方法,通过不断调整控制器参数,直至找到最佳控制效果。
过程反应曲线技术通过分析系统的阶跃响应,来确定PID控制器的参数。
Zeigler-Nichols方法是一种基于系统动态特性的调优方法,能够快速准确地确定PID控制器的参数。
PID控制器的结构包括比例、积分和微分三个部分,它们共同作用于控制过程。
PID控制器的数学表达式是其设计和实现的基础。通过调整比例、积分和微分参数,可以改变控制器的性能。
PID控制器在工业控制中有着广泛的应用。
炉温控制是PID控制器的一个重要应用领域。通过精确控制温度,可以保证产品质量和生产效率。
在光伏系统中,PID控制器用于追踪最大功率点(MPPT),以提高系统效率。
PID控制器在电力电子转换器中的应用,可以提高电能转换的效率和稳定性。
PID控制器可以通过各种接口与工业设备连接,实现精确控制。
Arduino平台因其灵活性和易用性,常被用于实现PID控制器。通过编写相应的程序,可以轻松实现PID控制逻辑。
通过上述内容,我们可以全面了解PID控制器的基本概念、工作原理、类型、调优方法、结构、应用以及接口实现。PID控制器作为工业控制中的核心组件,其性能直接影响到系统的稳定性和效率。希望本文能够帮助读者更好地理解和应用PID控制器。